Linear graphs
Planes can be defined using linear equations. Use this resource to review linear graphs.
Just as we can define an equation for a line in three dimensions, we can do the same for an entire plane–that is, we can define an equation that represents a two-dimensional space within a 3D space.
A plane is a subset of three dimensional space. You can think of it as a flat surface that extends infinitely in two directions. It may be defined as:
A Cartesian equation is a way to describe shapes using the \(x\)—\(y\) coordinate system. It is handy for analysing the properties and positions of geometric 2D shapes in 3D space.
Consider the following diagram, which shows a part of a plane.
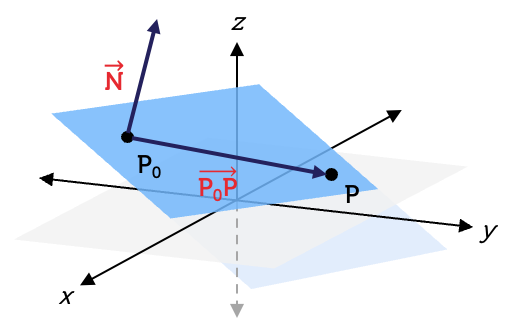
On the plane are two points, \(P(x,y,z)\) and \(P_{0}(x_{0},y_{0},z_{0})\). The equation for the vector extending from \(P_{0}\) to \(P\) is:
\[\overrightarrow{P_{0}P} = (x-x_{0})\hat{i}+(y-y_{0})\hat{j}+(z-z_{0})\hat{k}\]
The diagram also shows a normal vector to the plane—that is, a vector at right angles to the plane—represented by:
\[\overrightarrow{N}=a\hat{i}+b\hat{j}+c\hat{k}\]
where \(a\), \(b\) and \(c\) are constants.
Another normal is given by \(-\overrightarrow{N}=-a\hat{i}-b\hat{j}-c\hat{k}\); this just a vector in the opposite direction of \(\overrightarrow{N}\) and is still at right angles to the plane.
As \(\overrightarrow{N}\) is perpendicular to \(\overrightarrow{P_{0}P}\), their scalar or dot product must equal \(0\). Go back to the page on scalar or dot product to review this concept.
This means \(\overrightarrow{N}\cdot\overrightarrow{P_{0}P}=0\). Written out in full, this is:
\[(a\hat{i}+b\hat{j}+c\hat{k})\cdot((x-x_{0})\hat{i}+(y-y_{0})\hat{j}+(z-z_{0})\hat{k})\]
So:
\[a(x-x_{0})+b(y-y_{0})+c(z-z_{0}) = 0\]
This equation defines the plane in Cartesian coordinates.
We can rearrange the equation by expanding the brackets and moving all of the \(P_{0}\) coordinates to one side and the \(P\) coordinates to the other:
\[\begin{align*} a(x-x_{0})+b(y-y_{0})+c(z-z_{0}) & = 0\\
ax+by+cz & = ax_{0}+by_{0}+cz_{0}\\
& = d
\end{align*}\]
where \(d\) is a constant.
In fact, the general equation of a plane with the normal vector \(\overrightarrow{N}=a\hat{i}+b\hat{j}+c\hat{k}\) is:
\[ax+by+cz = d\]
Some examples of equations representing planes are:
There are an infinite number of parallel planes that are perpendicular to a given vector. For instance \(2x-3y+z=6\), \(2x-3y+z=0\), \(2x-3y+z=-1\) and \(2x-3y+z=11\) are all perpendicular to the vector \(2\hat{i}-3\hat{j}+\hat{k}\). However, only one of these will pass through a given point.
If a plane has the normal vector \(\overrightarrow{N}=\hat{i}+2\hat{j}-5\hat{k}\) and contains the point \((3,4,1)\), determine the equation that represents it.
Substitute the values into the correct formula to find the equation. The normal vector is in the form \(a\hat{i}+b\hat{j}+c\hat{k}\) and the point is \((x_{0},y_{0},z_{0})\).
\[\begin{align*} a(x-x_{0})+b(y-y_{0})+c(z-z_{0}) & = 0\\
1(x-3)+2(y-4)-5(z-1) & = 0\\
x-3+2y-8-5z+5 & = 0\\
x+2y-5z & = 3+8-5\\
x+2y-5z & = 6
\end{align*}\]
You may notice that the coefficients for \(\hat{i}\), \(\hat{j}\) and \(\hat{k}\) for the normal vector \(\overrightarrow{N}\) are the same as the coefficients for \(x\), \(y\) and \(z\) in the equation for the plane.
Given a point and the equation of a plane, we can find the normal vector. We use the same formula to calculate this.
\[\begin{align*} 6(x-1)-5(y-2)+1(z-3) & = 0\\
6x-6-5y+10+z-3 & = 0\\
6x-5y+z & = 6-10+3\\
6x-5y+z & = -1
\end{align*}\]
Since the plane is parallel to \(z=2x+3y-4\), it will have the same normal vector. We can rewrite \(z=2x+3y-4\) as \(2x+3y-z=4\). The normal vector is therefore \(2\hat{i}+3\hat{j}-\hat{k}\).
So, the equation of the plane we wish to find will pass through the point \((2,1,-5)\) and have a normal vector \(2\hat{i}+3\hat{j}-\hat{k}\). Substituting the values into the formula:
\[\begin{align*} 2(x-2)+3(y-1)-1(z+5) & 0\\
2x-4+3y-3-z-5 & = 0\\
2x+3y-z & = 4+3+5\\
2x+3y-z & = 12
\end{align*}\]
First, find vectors in the plane. Let's go with \(\overrightarrow{AB}\) and \(\overrightarrow{AC}\).
\[\begin{align*} \overrightarrow{AB} & = \left(x_{B}-x_{A},y_{B}-y_{A},z_{B}-z_{A}\right)\\
& = \left((2-1),(4-1),(3-1)\right)\\
& = \left(1,3,2\right)
\end{align*}\] \[\begin{align*} \overrightarrow{AC} & = \left(x_{C}-x_{A},y_{C}-y_{A},z_{C}-z_{A}\right)\\
& = \left((3-1),(2-1),(1-1)\right)\\
& = \left(2,1,0\right)
\end{align*}\]
The vector normal to the plane will be the cross product of the vectors \(\overrightarrow{AB}\) and \(\overrightarrow{AC}\). You might like to go back and review how to calculate vector or cross products.
We can then use the normal vector and any one of the three given points to find the equation of the plane. Let's go with point \(A(1,1,1)\).
Images on this page by RMIT, licensed under CC BY-NC 4.0
Linear graphs
Planes can be defined using linear equations. Use this resource to review linear graphs.
Scalar or dot product
It is worth reviewing your understanding of scalar or dot product to help you understand this concept. Use this resource to brush up on your knowledge.
Vector or cross product
If you need a refresh your understanding of vector or cross product, use this resource.


RMIT University acknowledges the people of the Woi wurrung and Boon wurrung language groups of the eastern Kulin Nation on whose unceded lands we conduct the business of the University. RMIT University respectfully acknowledges their Ancestors and Elders, past and present. RMIT also acknowledges the Traditional Custodians and their Ancestors of the lands and waters across Australia where we conduct our business - Artwork 'Sentient' by Hollie Johnson, Gunaikurnai and Monero Ngarigo.
More information